|
|
|
项目维护人: 鲁郁 |
| ENGLISH |
|
|
|
|
|
|
|
|
|
|
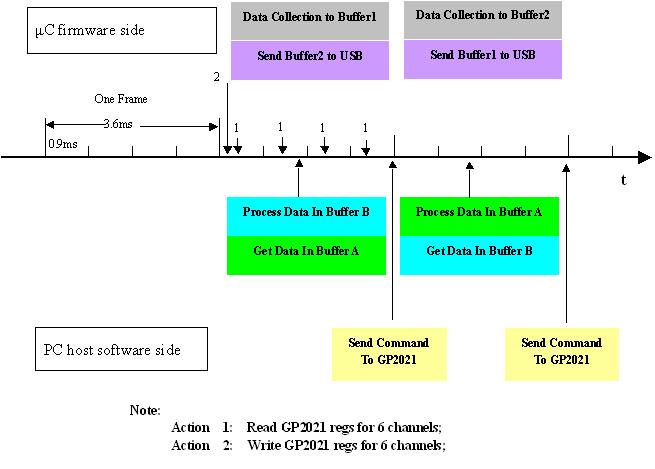
第一个0.9毫秒采集的数据 : accum_status_c,meas_status_a,accum_status_a,accum_status_b;( 8 bytes) 6 channels' accumulation data; ( 6*8 bytes) | |
|
第二个0.9毫秒采集的数据 : accum_status_c,meas_status_a,accum_status_a,accum_status_b;( 8 bytes) 6 channels' accumulation data; ( 6*8 bytes) |
|
|
第三个0.9毫秒采集的数据 : accum_status_c,meas_status_a,accum_status_a,accum_status_b;( 8 bytes) 6 channels' accumulation data; ( 6*8 bytes) |
|
|
第四个0.9毫秒采集的数据 : accum_status_c,meas_status_a,accum_status_a,accum_status_b;( 8 bytes) 6 channels' accumulation data; ( 6*8 bytes) |
|
|
6-channels' 测量值(measurement,仅当TIC发生更新) : 每个通道有 : CODE_SLEW,CODE_PHASE, CARRIER_CYCLE_LOW, CARRIER_DCO_PHASE, EPOCH,CODE_DCO_PHASE,CARRIER_CYCLE_HIGH,EPOCH_CHECK; ( 6*16 bytes) |
|
| 四次采集的时间戳; ( 4 bytes) | |
| 调试信息或为以后保留; ( 28 bytes) |
|
标志: ( 1 bytes) 1: PC 需要固件送采集的数据 ; 0: PC 不需要固件送采集的数据 ; |
|
|
指令的数目; (1 byte) 最多不能超过41个; |
|
指令 1: (3 bytes)
|
|
|
|
|
指令 41: (3 bytes)
|