|
ˇˇ |
|
Project Maintainer: Yu Lu |
|
|
|
|
|
|
|
|
|
|
|
#define MCNTRL 0x7E00 /*Main control register */
#define CCONF 0x7E01 /*Clk. config. register */
....
#define RXS3 0x7E3E /*RX status register 3 */
#define RXC3 0x7E3F /*RX command register 3 */
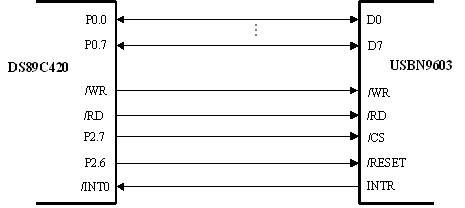
void write_usb(unsigned int usbadr, char dta);
char read_usb(unsigned int usbadr);
;***************************************************************
; This subroutine is used to access USBN9603 regs , read
; USAGE: char read_usb(unsigned int usbadr);
; Argument :
; INPUT: R6&R7: address of USBN9603's reg
; OUTPUT: R7: value of that reg
;***************************************************************
_read_usb:
PUSH DPH
PUSH DPL
MOV DPH, R6
MOV DPL, R7
MOVX A, @DPTR
MOV R7,A
POP DPL
POP DPH
RET
;***************************************************************
; This subroutine is used to access USBN9603 regs ,write
; USAGE: write_usb(unsigned int usbadr, char dta);
; Argument :
; INPUT:
; R6&R7: address of USBN9603's reg
; R5 : value to be written
; OUTPUT:
; none;
;***************************************************************
_write_usb:
PUSH DPH
PUSH DPL
MOV DPH, R6
MOV DPL, R7
MOV A,R5
MOVX @DPTR, A
POP DPL
POP DPH
RET
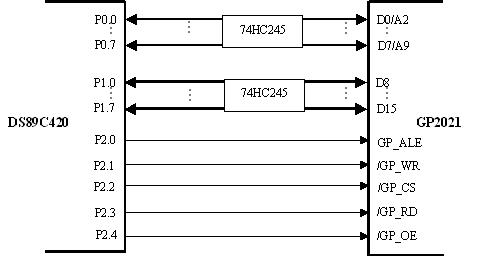
void write_gps(char add, char lo, char hi);
void read_gps(char add, unsigned int* datadd);
;************************************************************
; This subroutine is used to read one data(16bit) from gp2021
; Argument:
; INPUT: R7 --> address
; R4,R5 --> pointer for stored data
; OUTPUT:
; NONE
; USAGE :
;; read_gps(char add, unsigned int* datadd);
;************************************************************
_read_gps:
CLR EA ; disable all int
MOV DPH, R4 ; set the data pointer
MOV DPL, R5 ;
MOV P0, R7 ; send address first
MOV P2,#0EFh ; GPS_OE=0, GPS_ALE = 1
MOV P2,#0EEh ; GPS_OE=0, GPS_ALE = 0
MOV P0,#0FFh ; setup P0 and P1
MOV P1,#0FFh ;
MOV P2,#0E2h ; GPS_OE=0, GPS_RD = 0, GPS_CS = 0
NOP
MOV A, P0 ;
MOVX @DPTR, A ; Store the first byte
MOV A, P1 ;
INC DPTR ; data pointer ++
MOVX @DPTR, A ; store the second one
MOV P2, #0FEh ; Idle state
SETB EA ;
RET
;************************************************************
; This subroutine is used to write one data(16bit) to gp2021
; Argument:
; INPUT: R7 --> address
; R5,R3 --> MSB & LSB CHAR
; OUTPUT:
; NONE
; USAGE :
; write_gps(char add, char lo, char hi);
;************************************************************
_write_gps:
CLR EA ; disable all int
MOV P0, R7 ; send address first
MOV P2, #0EFh ; GPS_OE=0, GPS_ALE = 1
MOV P2, #0EEh ; GPS_OE=0, GPS_ALE = 0
MOV P0, R3 ; Send LSB first
MOV P1, R5 ; Send MSB next
MOV P2, #0E8h ; GPS_OE=0, GPS_WR=0, GPS_CS=0
MOV P2, #0FEh ; Idle state
SETB EA ;
RET